Building Manager
The Building Manager app is the interface for viewing, adding, changing, and deleting various aspects of the navigation maps created for each building site. This information is saved to the Cloud and can be read/processed by robots connected to the specified site.
Each site will have unique layer component settings in the Building Manager app to meet the site's needs. Make sure you are on the correct site before making any changes in this app!
Features
Within the Building Manager app, there are three main features:
- Map Selector
- Layer Selector
- Map Viewer
Map Selector

On the left panel of the app, the Map Selector lists all of the currently available navigation maps. Each map is a uniquely generated instance of the robot's mapping program. Each map can be individual floors, sections, or custom rooms of the building.
In this image of the Map Selector on the site FORD RTC, there are five maps available. The first map, "main-1", is selected. Upon selection, the Map Viewer on the right panel of the app will load the selected map.
You can also use the search bar function right above the list to, instead, search for a specific map.
Layer Selector
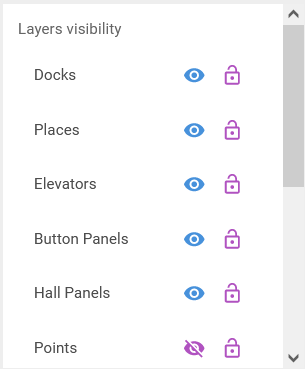
Located just below the Map Selector on the left panel, the Layer Selector displays all of the interactable features that can be placed on the navigation map. There are currently eleven different layers of map features shown on the front-end of Building Manager.
Docks
Docks are points where docking stations are located based on manual assignment.
Parameters (as shown in back-end):
- Site
- Name (required, string)
- Pose (required; new pose is created when creating a new dock, existing poses can be assigned as dock points)
- Pre-dock goal, aka Navigation Goal (required, new goal is created upon creating a new dock, existing goals can be assigned)
- Containing Map (required)
Places
Places are points or polygons that are navigation destinations for the robot. Places are umbrella terms for an assigned goal, such as the navigation or point goals.
Parameters:
- Site
- Name
- Containing Map
- Pose
- Linear Tolerance (default value is 0.05)
- Angular Tolerance (default value is 0.02)
Elevators
Unsure what assets the Elevators layer will display.
Button panels
Have not interacted with button panels yet.
Hall Panels
Have not interacted with hall panels yet.
Points
Points are all named 2-D, coordinate-based points placed in respect to the navigation map. These points, combined with poses, are necessary to assign locations for docks, navigation and/or point goals, and other significant map assets. Enabling visibility of this layer will display all points on the selected map.
Parameters:
- Site
- Name:
- X:
- Y:
- Containing map:
Poses
Poses are similar to points but have an additional "yaw" vector value alongside the 2-D, (x,y) coordinates. This additional parameter dictates which direction the robot will face when fulfilling the pose-based goal requirements. Poses are required for docks, navigation and/or point goals, and button panels. Enabling visibility of this layer will display all poses on the selected map.
Parameters:
- Site
- Name
- X
- Y
- Containing map
- Yaw
Polygons
Polygons are named areas on the navigation map. Enabling visibility of this layer will display all polygons on the selected map.
Navigation Map
The static .png image file that sets the navigation area for the robot. Black lines and areas are walls or obstructions. Grey areas are out-of-bounds locations. White areas are free space to travel. A valid navigation map must be first uploaded using this app to begin utilizing navigation commands and functions.
Speed Map
The static .png image file that sets no-go and lower speed zones for navigation. Color gradients on the speed map dictate areas that the robot will either travel slowly through or not travel through at all.
A valid speed map must be first uploaded using this app to begin utilizing navigation commands and functions! If first setting up a site, a blank (white) .png image file of the same dimensions as the navigation map should just be uploaded.
- Docks: Points where docking stations are Located
- Places: Points on the navigation map that the robot can move to
- Elevators: (Point or polygon?)
- Button Panels: Points where elevator button panels exist on the map
- Hall Panels: ???
- Points: (Is this different from places?)
- Poses: Points with specified yaw, or direction where the robot is facing. Requires
- Polygons: Polygons that include (all created polygons???)
- Navigation Map: Toggles the current map on or off
- Speed Map: Polygons where speed can be defined
- Cost Map: ???
Clicking on the eye icon will toggle the layer view on or off. The lock icon will toggle (changes? positional lock?)
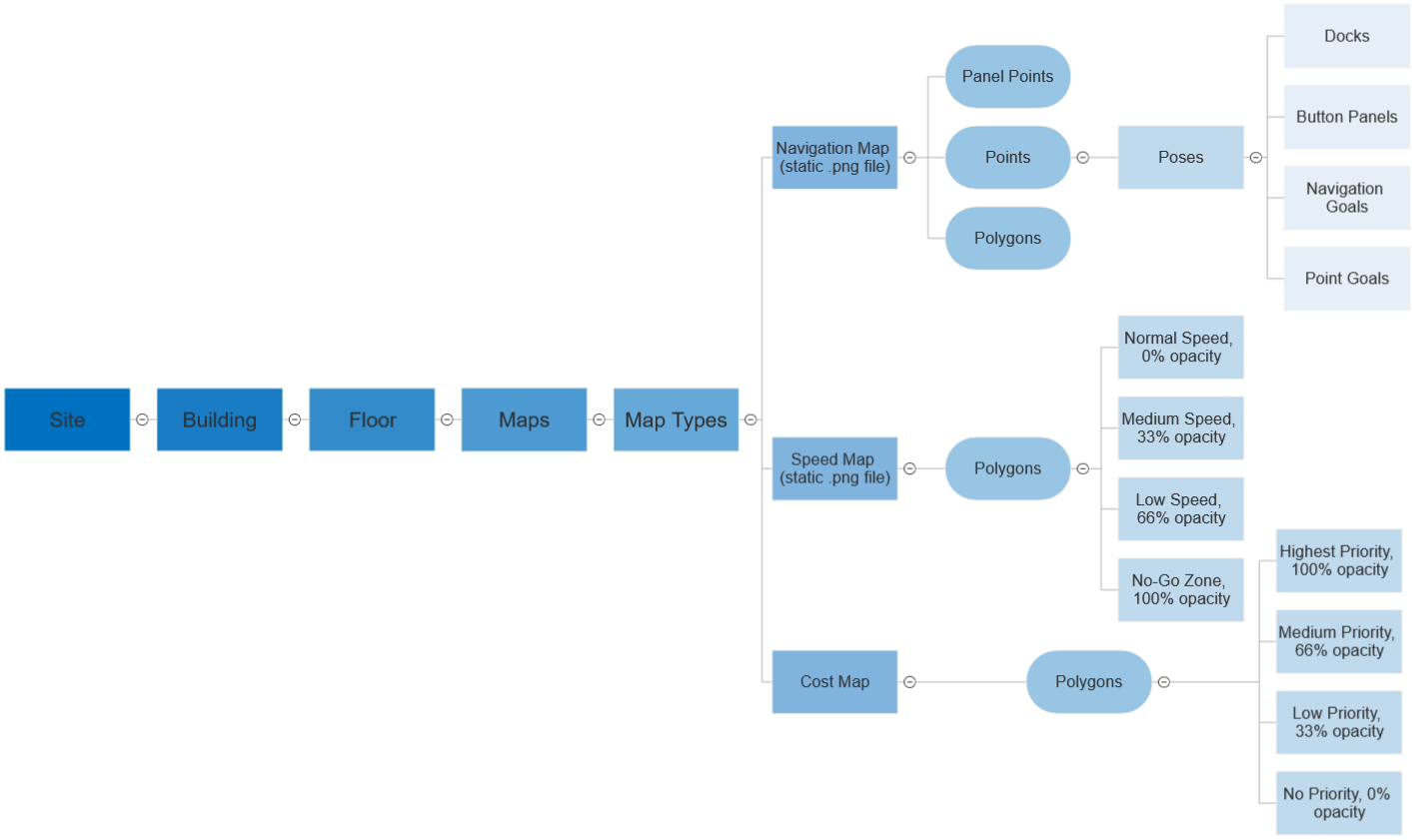
Below is a hierarchy tree of assets and layers represented in the building manager.
For each map layer, clicking on the map selection will show options to Upload Map and Download Map. Currently, all new and updated maps will be added using this front-end interface. If there is already an uploaded map in the database, using the Upload Map will replace pre-existing maps with any newly uploaded maps.
Map Viewer
More text
If no map is selected or uploaded on the Map Selector, the Map Viewer will be blank.